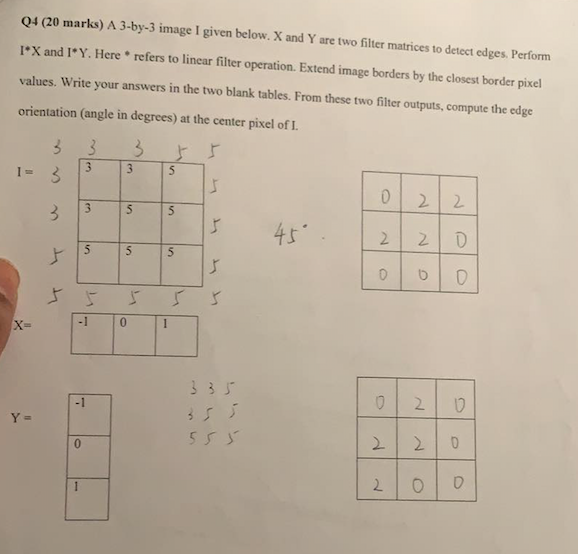
A 3 by 3 image I is given below, X and Y are two filter matricesto detect images. Perform I *X and I*Y. Here * refers to linearfilter operation. Extend image borders by the closest border pixelvalues. From these two filter outputs compute the edge orientation( angle in degrees) at the center pixel of I. NOTE: This is theright answer please explain how to get this.
Q4 (20 marks) A 3-by-3 image
OR
OR