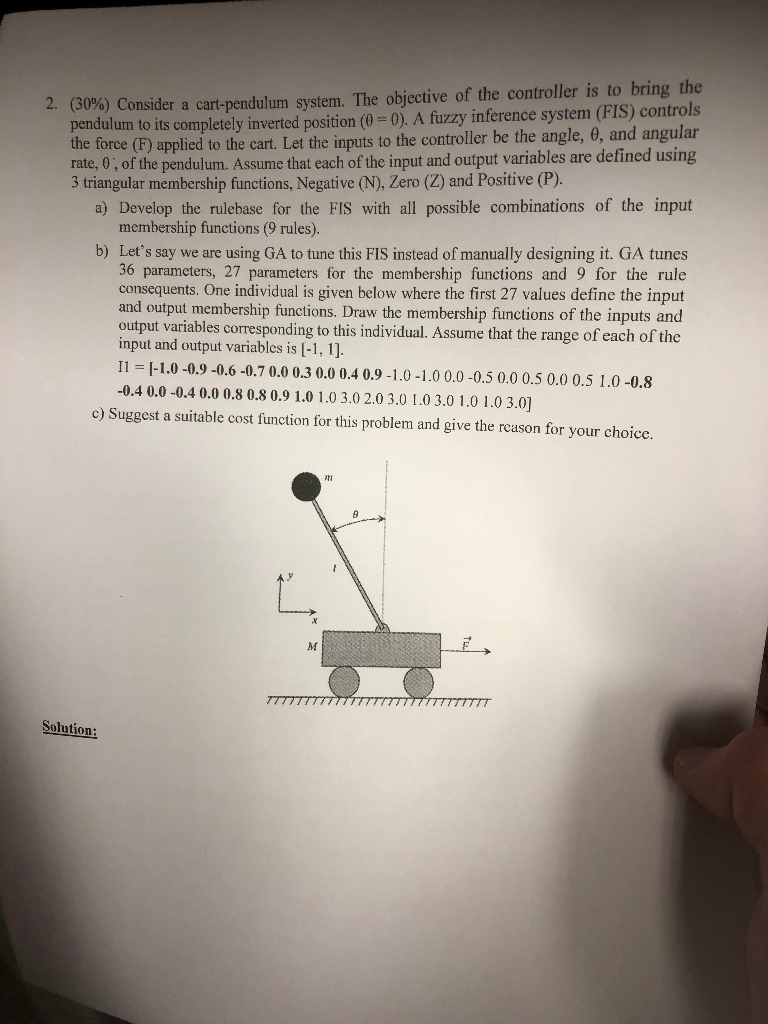
(30%) Consider a cart-pendulum system. The objective of the controller is to bring the pendulum to its completely inverted position (0 0). A fuzzy inference system (FIS) controls the force (F) applied to the cart. Let the inputs to the controller be the angle, θ, and angular rate, 0, of the pendulum. Assume that each of the input and output variables are defined using 2 3 triangular membership functions, Negative (N), Zero (Z) and Positive (P) a)
OR
OR