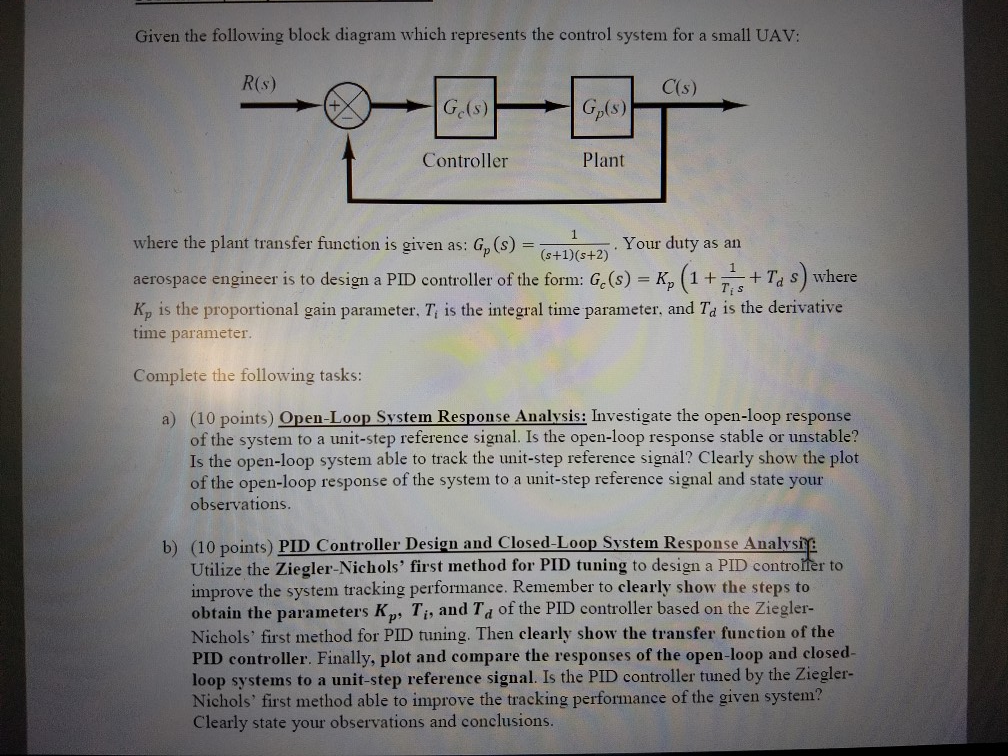
given the following block diagram which represents the controlsystem for a small UAV
Given the following block diagram which represents the control system for a small UAV R(s) C(s) Gp(s) Controller Plant where the plant transfer function is given as: Gp (s)-(s+1)(s+2) . Your duty as an acrospace engineer is to design a PID controller of the form: G,(s) – K, (1++ Ta s) where Ti s Kp is the proportional gain parameter. T, is the integral
OR
OR